
Publications

Luke Rowe*, Rodrigue de Schaetzen*, Roger Girgis, Chris Pal, Liam Paull,
WAD @ CVPR 2025. Winner of the 2025 Waymo Vision-based End-to-End Driving Challenge
[paper]
Luke Rowe, Roger Girgis, Anthony Gosselin, Liam Paull, Chris Pal, Felix Heide,
Computer Vision and Pattern Recognition (CVPR), 2025
[paper] [project page] [code]
Luke Rowe*, Roger Girgis*, Anthony Gosselin, Bruno Carrez, Florian Golemo, Felix Heide, Liam Paull, Chris Pal,
Conference on Robot Learning (CoRL), 2024
[paper] [video] [project page] [code]
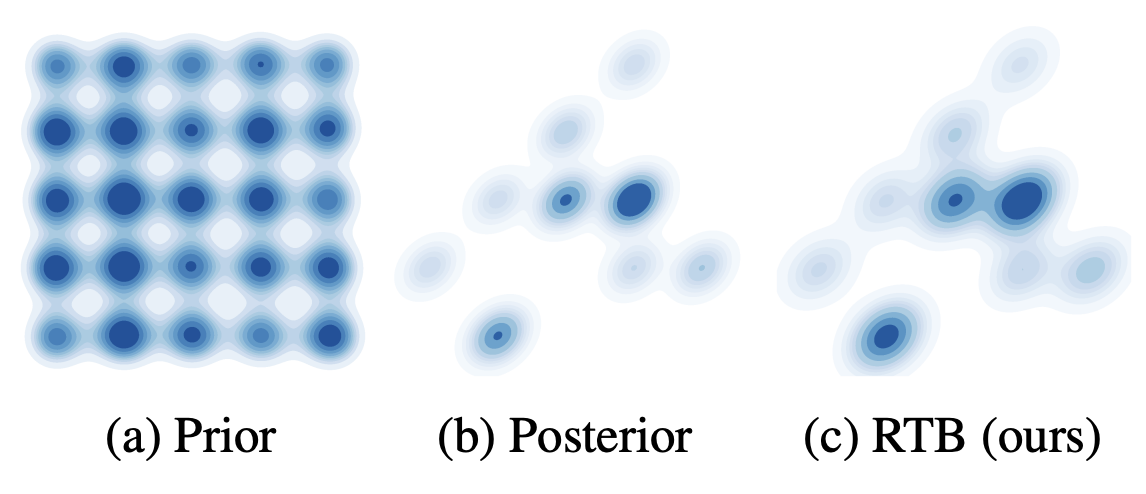
Siddarth Venkatraman*, Moksh Jain*, Luca Scimeca*, Minsu Kim*, Marcin Sendera*, Mohsin Hasan, Luke Rowe, Sarthak Mittal, Pablo Lemos, Emmanuel Bengio, Alexandre Adam, Jarrid Rector-Brooks, Yoshua Bengio, Glen Berseth, Nikolay Malkin,
Neural Information Processing Systems (NeurIPS), 2024
[paper] [code]
Luke Rowe, Martin Ethier, Eli-Henry Dykhne, Krzysztof Czarnecki,
Computer Vision and Pattern Recognition (CVPR), 2023
[paper] [video] [project page] [code]
Chengjie Huang, Van Duong Nguyen, Vahdat Abdelzad, Christopher Gus Mannes, Luke Rowe, Benjamin Thérien, Rick Salay, Krzysztof Czarnecki,
IEEE International Conference on Intelligent Transportation Systems (ITSC), 2022
[paper]